基础科学新领域 ,原始技术新时空
——访北京功顺达仿生科技有限公司董事长谌桂生
《物生机构学》,是《物生单元体机构体系》、《虚实形变太极拓扑几何学及其机构》系列的简称。它具有广度、深度、繁度以及多变度,而且是跨学科、跨领域的交叉融合,是一门新基础科学原理,是新领域和原始技术新空间。
谌桂生,北京功顺达仿生科技有限公司董事长。谌桂生及其公司研发的产品曾获北京发明创新大赛、全国发明展览会金奖、银奖、铜奖以及各种主要的技术奖三十多项,其中自适应柔性机械手还获得第二届全国发明展览会铜牌奖和星火杯二等奖。谌桂生发明了多项专利,在第十四届北京发明创新大赛荣获“老当益壮奖”,并在中国科学家论坛、中国管理科学研究院学术委员会等平台发布十多项优秀论文荣获一等奖。
虚实形变,打造科技新领域
《物生机构学》与阴阳、虚实、“一生二,二生三,三生万物”以及“太极生两仪,两仪生四象、,四象生八卦”等中国传统文化结合,还与数理化等自然科学结合,采用共性思维,从物质结构、生物结构的共性中找到了虚实组合的新概念,形成新的规律、规则及其新原理。
谌桂生从小就特别喜欢数理化知识,常常动脑思考,动手制作。大学期间,谌桂生学习了各种力学以及建筑专业知识,并在1970年从湖南大学毕业后来到北京齿轮总厂工作。专业知识与械制造相结合,理论与实际碰撞出火花,谌桂生开始自主进行业余科研理论性的探索。1976年,唐山地震波及到北京。当时的谌桂生负责厂房的抗震加固工作,他由稳定结构的概念联想到“虚实组合,虚实形变,虚实稳动与动静时空”的新概念、新原理,至此他开始了长达四十多年对物生机构学的研究。谌桂生从宏观天地、日月星辰到微观物质,从自然中的植物、动物、人造物到原子、分子和细胞,都联想到了“虚实”“虚实形变”、“动静时空”的新思维。使谌桂生最受启发的是,在1985年5月,通过日本加藤先生对研究精细化机器人机构和“肌肉式机构”的介绍讲解,谌桂生开始着手研发类分子、类细胞结构、肌动机构(肌肉或机构)、肌骨机械机构、机器生物、肌骨机械机器人机构。当1986年国家“863”计划的春风吹向了中原大地,在国家政策的支持下,谌桂生在1987年成立了北京市朝阳区仿生机械研究所,准备从基础技术到原始技术进行长期研发和探索,从中找出虚实共性,在共性中进行交相融合,找出各方面的新概念、新原理、新特征和新功能。作为一个民营科技企业,想要研究新科技,抓住新的先机,面临着很大的困难,尤其是经济方面的资金短缺。当时谌桂生采取了生产养科研的方式,白天全力生产,晚上采用自己的发明专利搞科研和制作样品样机。当谈及支撑下来的动力时,谌桂生激动地说道,首先是改革开放,国家支持且允许开设民办科技机构,其次就是原厂的支持,允许他带薪出厂搞科研;特别是北航张启先教授对谌桂生的认同和支持,并传授他一些知识,并且常常鼓励谌桂生,有潜力的基础性科技不可轻言放弃,一定要坚持到底,成果在最后。于是谌桂生带领他的团队坚持不懈地长期研发,找出新原理,做出新样品样机,在理论与实际相结合的基础上,互相验证,互相促进,互相融合,从而进一步提升。制作的样品样机作为模型和科教仪,强有力地推动和验证了动态形变几何学的新规则、新规律和新定义,进一步开创了“虚实形变拓扑几何学及其机机构”,各种虚实形变的物生机构也有章可循,有规则可依。

《虚实形变拓扑几何学及其机构》在工程技术中的应用专家组论证会


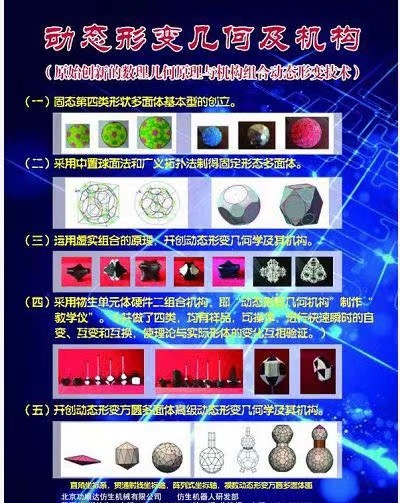
四十多年的艰苦奋斗,四十多年的风雨兼程。谌桂生团队从理论“共性”开始,通过技术、样品样机加以验证,并从中发现其原理和新的技术方案,再推进多种原理与技术的交相融合,形成系统的理论和新技术体系。首先是研究“物生机构”的虚实共性,根据宏观天地的“广义虚实论”、个体或微观的“相对虚实论”以及数理几何方面的“虚实形变勾股几何方圆论”这些原理,进行“类分子”、“类细胞”单元机构,然后由这些机构进行再一次或多层次的结合,组成肌动机构;肌骨机械机构系列,多种机器生物,肌骨机器人机构,这些机构都具有“一种形体,万能组合”、“一种组合,万能形变”的功能和特征,并且授权了多项专利,开启了哲学思维,虚实共性、数理原则,点面得体,虚实形变、广义概念,数理化机,刚柔弹塑、拓扑手法,拓扑同胚,虚实流行、综合系统,稳动稳控与自适应的组合方式的五项新理念、新原理,实现了自然科学与物生机构学、基础科学的首度密切融合;之后采用了“硬件二组合的”、“类分子、类细胞”的“万能单元体机构”,进行“1+1”、“1+n”新方法进行各种多级组合,将“毕达哥拉斯”的勾股定理、黄金分割率等数理规则融入动态的类分子、类细胞机构中,制作出虚实形变平面的互变机构或立体互变机构;随后进行立体组合,组成动态形变几何机构的“多棱凌柱体机构”,在此基础上引入柏拉图多面体、阿基米德多面体和开普勒多面体,由组成的各种立体式伸缩母线进行再组合,就可组成动态形变几何多轴系多面体,也就是虚实形变拓扑几何多面体的基本型。这是一种虚实组合、虚实形变的几何学与几何机构的高度融合,是一种全新的“虚实形变,动静时空”新机构,是新一代虚实时空机构的开始,也是数理几何学与机构学系统性密切融合的开始,通过进一步研发、进一步提高和组合,形成了“虚实形变拓扑几何新科学科及其机构”。
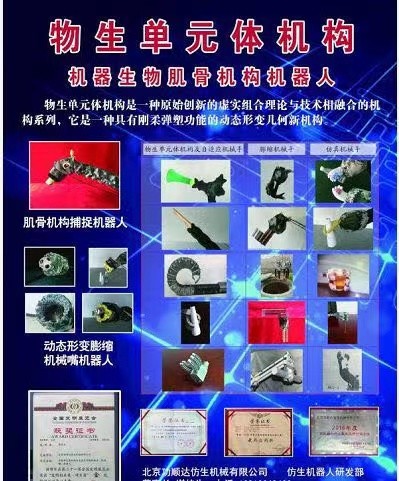
在这些已总结出的新基础理论、新几何学和原始技术的背景下,谌桂生团队研发出了种种系列样品,创建了“类分子”、“类细胞”、“类肌肉式机构”,如新创的肌动机构、肌骨机械机构、自适应柔性机械手、膨缩结构的机械手、机械嘴、捕捉机器人等,并且与多位技术工人一起,做了10多套系统性原理的“虚实形变机构”,统称为 “类分子”、“类细胞”单元体机构。其中有固态的,也有虚实形变的,还做了较复杂的综合性自适应柔性机械手,它只需要安装一个动力控制,其手部机构就具有自适应功能,能抓取各种不同形状的物体,非常灵活、实用。这些样品、样机,形状特别、功能突出,得到多方认同。当制作的柔性自适应柔性机械手安装在张教授(中国工程院院士)自创的羚羊牌机器人上,其自适应功能很强,十分灵活,得到了不少好评和大力支持。谌桂生团队还发明了《三维稳动肌骨机械机构》专利,它是机器人的一种硬件新机构,具有许多新功能和新特征。谌桂生团队重点开发人工智能机器人,在硬件机构上将有许多新的突破,形变功能也走向规则,规律化。在近期,团队的发明专利“一种虚实形变规则的形变单元体机构”也已授权,这是“动态形变几何学及其机构”的继续,是虚实形变拓扑几何学及其机构的具体实施的基础原理和技术措施。

注重创新,引领发展新时空
在当今大发展的时代下,物生单元体机构体系越来越受国家重视。近年来,由北京发明协会组织专家论证组、科学院北京机器人联盟专家、知名大学博导教授组团,论证动态形变几何学模型,并开始进行中国管理科学院学术委立项的《物生单元体机构体系》等多项新实施计划。北京功顺达仿生科技有限公司根基牢固,未来的发展可谓是一片光明。
公司的发展离不开创新,创新是引领发展的第一动力。谌桂生团队搞科研时,同时进行理论创新与技术创新,并进行产学研合作,注重产品品质和质量,扎根筑台。当谈到公司未来三到五年的规划,谌桂生说道,十四五期间公司将完成中国管理科学研究院学术委员会的课题立项和《物生单元体机构体系》的研究。作为中国未来研究会的团体会员,公司的创新项目会继续在许多方面进行突破,并且会继续扩员,其目标是“数理化机,钢柔弹塑”。


物生单元体机构体系的发明,作为一个新科技的发明,将开启新的刚柔软伸缩技术、膨缩技术、收展技术、吻接技术、稳动技术、动态形变几何机构技术、虚实形变拓扑技术、肌动机构与肌骨机构技术、自适应膨缩机械手、机械嘴、物生机器人技术、自由对接技术、集散技术等;还将由此开发出许多有关形变与膨缩的新工艺,这些都将作为国内外首创领先开发。我们坚信,物生单元体机构体系未来定会在海内外舞台上发光发亮、独放异彩。
物生机构的制作,物生机构学的建立,将开启数理化机四项理论与应用,它们齐头并进,带领虚实形变的新机构走向前沿。而人工智能机械、机器人也必然会走向虚实形变、动静结合的新方向。未来,北京功顺达仿生科技有限公司在谌桂生先生的带领下定会成为民族三维科技品牌,成为鼎立世界的核心力量。
